

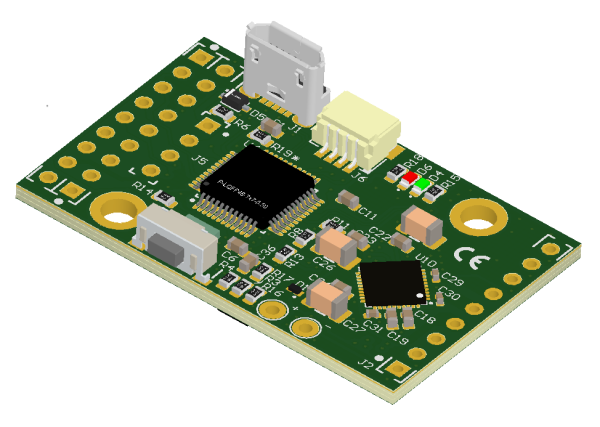
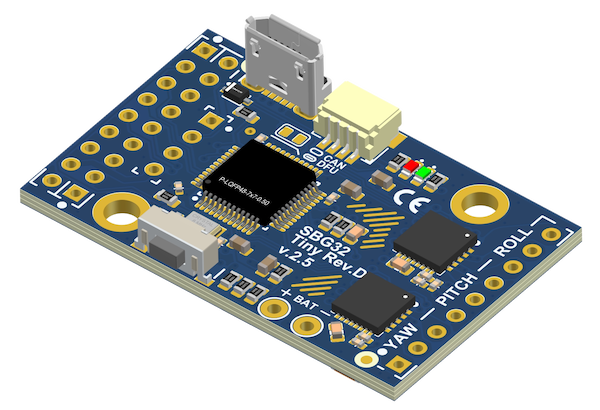
BaseCam SimpleBGC 32-bit Tiny
This controller is a smaller version of SimpleBGC 32-bit 3-axis stabilization. It is designed for building gimbals for small cameras.
Features
Built-in IMU sensor, can be used as a second frame sensor or as the main sensor.- Has the same set of interfaces as the full-size SimpleBGC 32-bit.
- Possibility to connect optional Bluetooth module.
Revision D—Active
Retains all parameters of Rev. C with some improvements:
- Motor drivers emit less EMI noise and a bit more powerful
- Optional CAN bus interface (requires the "Tiny+ Extended" firmware and the "Basecam external CAN transceiver"; see Downloads section for instructions and Version comparison Chart for available functionality)
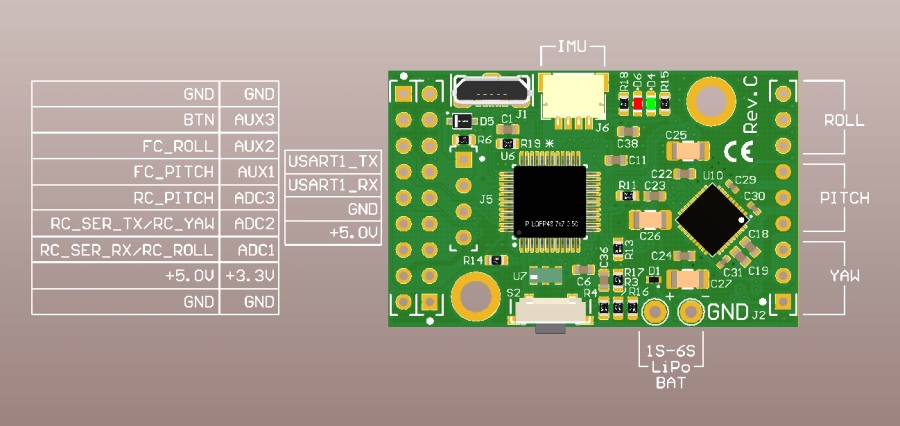
Revision C—Active
- Fully compatible with the "Tiny Rev. B" in shape, terminals, and mounting holes.
- Dimensions are 25×40 mm, height is 7mm (pin headers are not installed)
- Output power capabilities up to 6 times more than in Tiny Rev. A and B, which allows using this board with a wider range of payloads, handling motors from micro-size to 110-size.
- High-voltage motor drivers are connected directly to the power supply, giving the following advantages compared to Rev. A, B*:
- overall output current is limited only by the power supply capabilities;
- can handle high-voltage motors and big motors up to 110 sizes;
- better reliability
- Motor drivers have better efficiency (less heat emission at the same output power)
- MCU with 256k FLASH (2x more than in previous revisions) can support advanced functionality which presents in the "Extended" series of SBGC32 controllers**
* For maximum current capabilities good thermal dissipation should be provided;
** Supported functions depends on the license type. See Version comparison chart
WARNING: Notes on EMI noise in revision C
Drivers in rev.C are more efficient but produce more EM interference compared to Rev. A, B; special actions are required to prevent interference on digital signal lines (I2C or PWM) and nearby electronics:
- installing filters on the power supply cable (several turns on a ferrite ring); limiting its length to 70 cm;
- installing filters on motor outputs and/or shielding the cable:
- LRC-filter (see schematics)
- ferrite ring on the cable
- installing filters on the digital signal lines (several turns on a ferrite ring); using twisted pairs for I2C (SDA+VCC, SCL+GND) and/or shielding them.
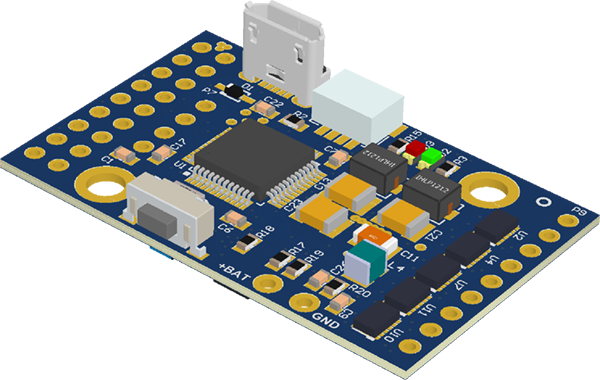
Revision A (Discontinued) & Revision B
Not recommended for new design
For more information on Rev. A and B check their product page
The main difference from revision C:
- low-voltage motor drivers (max. 11V) powered from integrated DC/DC converter, where the overall current is limited by the DC/DC converter max. capabilities (about 1A); can handle only low-voltage motors;
- MCU with 128k FLASH supports only basic functionality of "Regular" and "Tiny" series;
Revisions A and B may be manufactured in batches by request; we keep a limited number of Rev.B in stock.
Specifications
| Revision B | Revision C | Revision D | |
 |
 |
 |
|
| Size of the board | 40×25×7 mm | ||
| Weight: | 5.84 g | 5.45 g | |
| Power supply voltage | 3.7—25 V (1s - 6s LiPo) | 5—26 V (2s - 6s LiPo) | |
| Maximum motor current | 1A per motor 1.5A for all |
5A peak ~1.5A continious per motor* |
6A peak ~2A continious per motor* |
| 5V converter output | up to 1A | ||
* Board uses a dedicated PCB layer (almost 100% of its area) for a heat dissipation. The overall current capabilities of 5V regulator and motor outputs are limited by the thermal dissipation; it can be improved installing external heatsink.
Downloads
USB Drivers for PC Connection
If controller being connected to the USB port, is not recognized as COM-port, most probably you need to install or update drivers for CP210x chip. You can download driver for your OS from the manufacturer of CP210x.
AN IMPORTANT NOTE: The latest version (6.7.4) of driver for Windows may cause problems with delay in data transmission, visible as a big lag of the GUI. In this case, install version 6.7.2 of the driver, which had no such problems.
Support
Type your question or comment below. Answer will be sent at your E-mail within 24 hours on workdays.