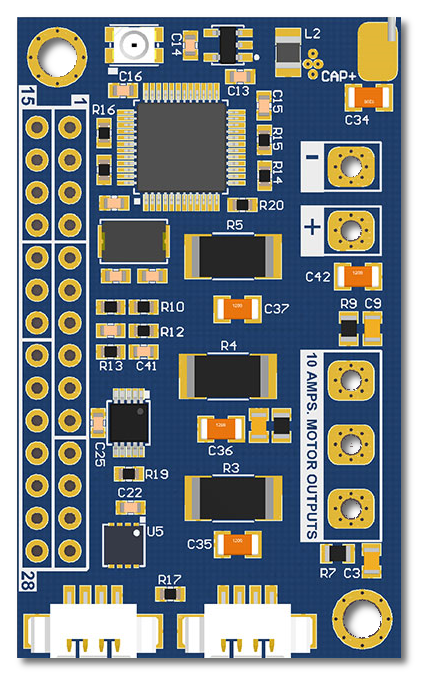
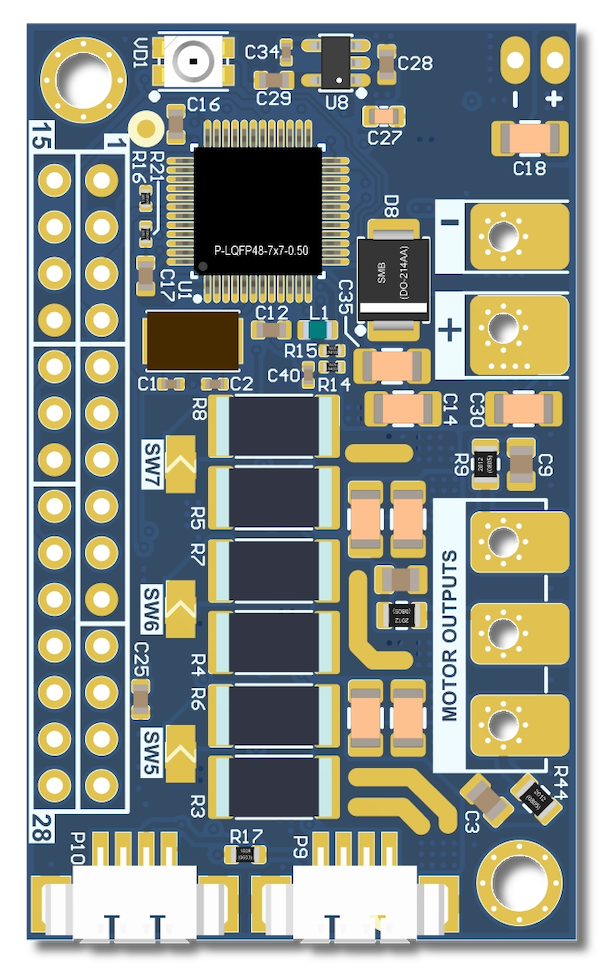
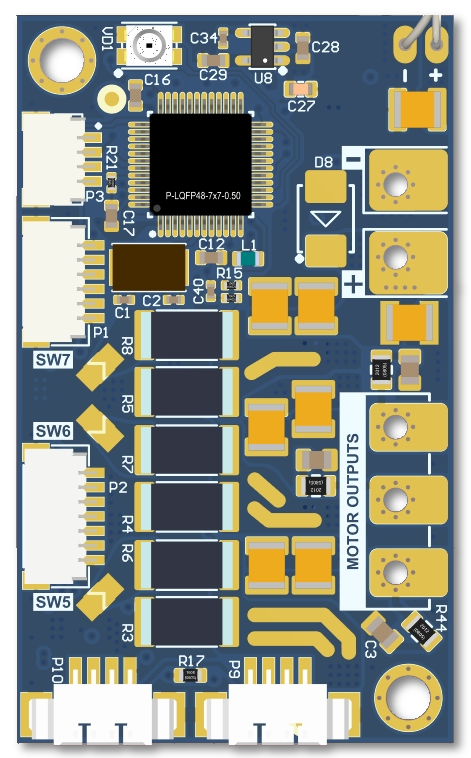
CAN_Driver
Motor driver with the
It allows you to build a 3-axis stabilizer based on a modular scheme (see connection diagram) or an extended regular stabilizer by the 4th, 5th axis, with the optimized wiring between modules that is perfectly immune to EMI noise.
This module was designed for use with the "extended" controllers (Extended, Pro, CAN_MCU, OEM), replacing the onboard drivers. Requires firmware version 2.66b1 or higher.
Specifications
| 1.0.x | 1.1.x | 1.2.x* | |
 |
 |
 |
|
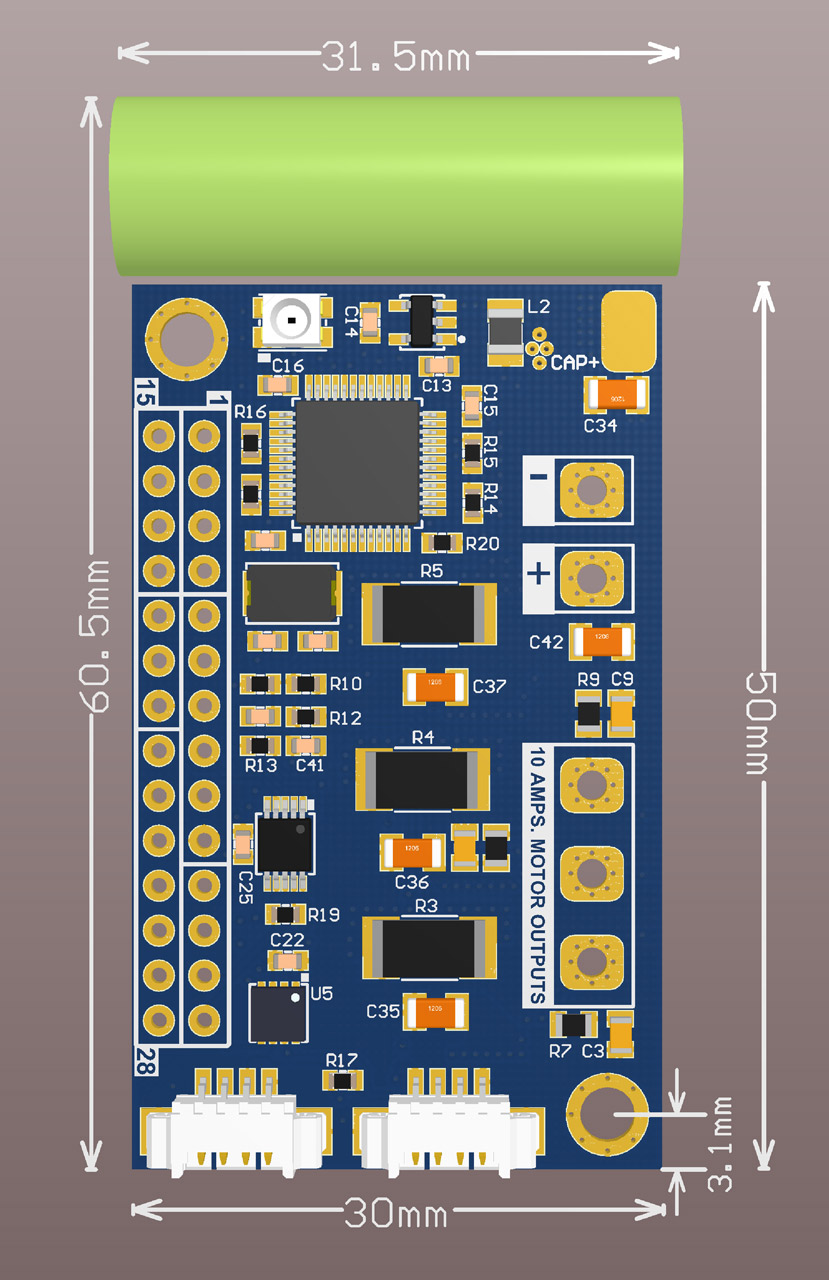
| Size of the board | 50×30 mm, with capacitor 60.5×31.5mm | ||
| Weight | 11.50 g PCB with capacitor | ||
| Power supply voltage | 6–26 V (2s - 6s LiPo) |
6–40 V (2s - 9s LiPo) |
6–52 V (2s - 12s LiPo) |
| Maximum motor current | 15A continuous (with heatsink installed), max. 40A impulse | 30A continuous (with heatsink installed), 40A short-time | 20A continuous (with heatsink installed), 40A short-time |
| Current sensor max. range adjustment | NO | 15A or 45A via solderable jumpers SW5-SW7 |
|
* Firmware 1.29 or later is required
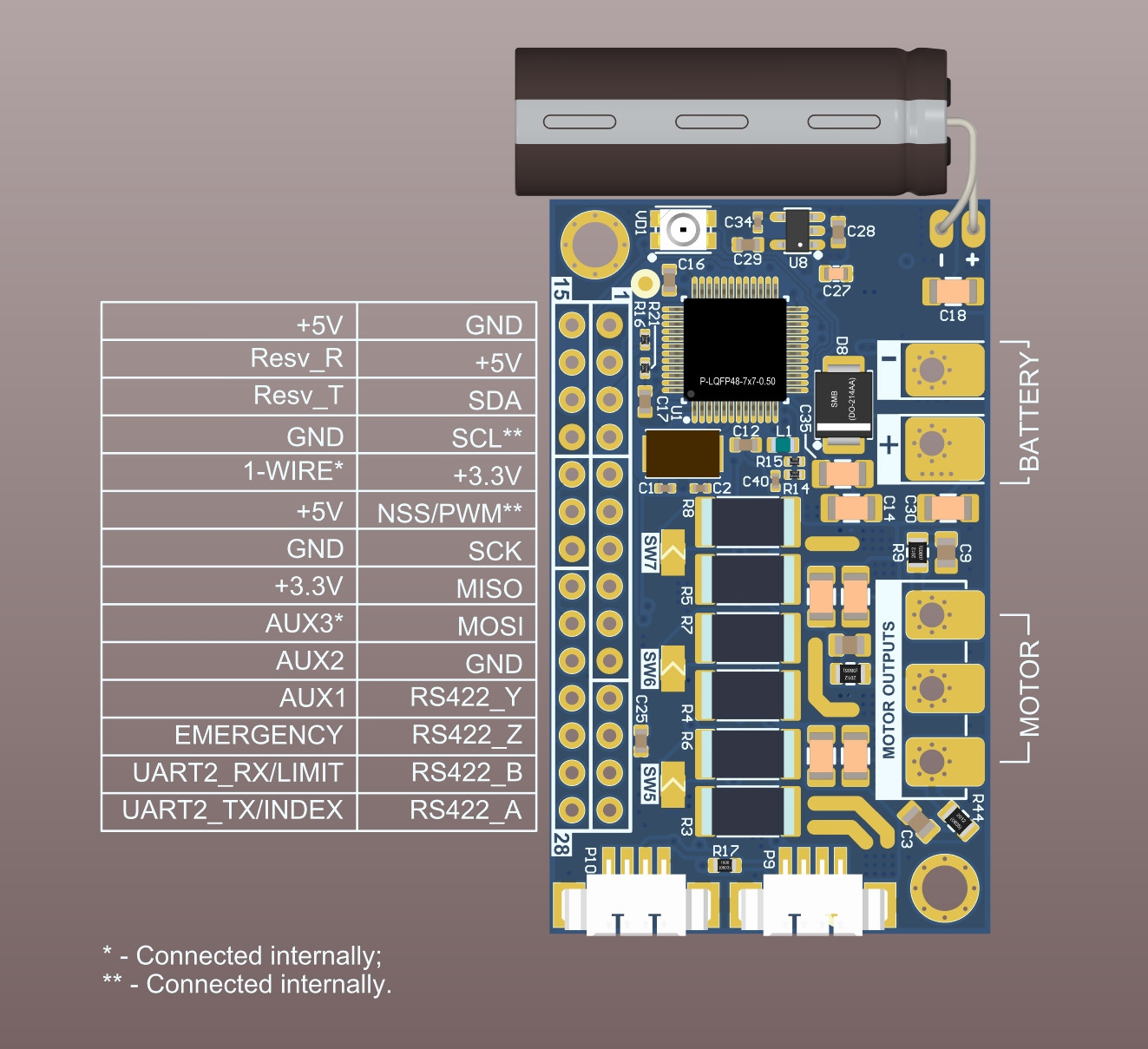
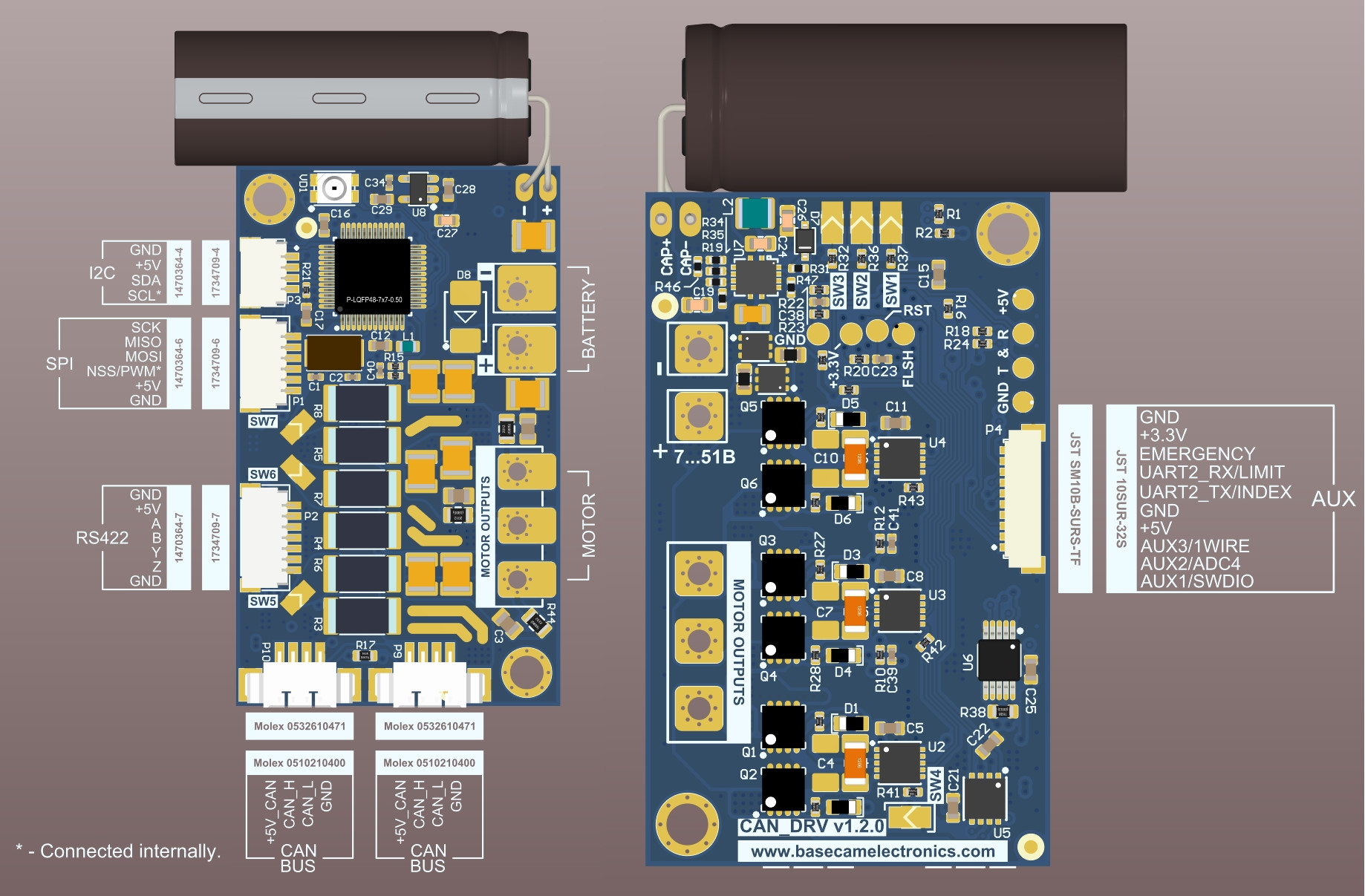
Driver supports a big number of models of absolute rotary encoders with the following interfaces:
- SPI
- PWM
- I2C
- A, B, Z
- SSI, BiSS-C (3v3, RS422)
Main controller connection:
- 2x CAN, optional onboard terminator
Other interfaces:
- Limit switch,
Z-Index switch, Emergency switch, and several digital I/O pins - 1-wire for thermal sensor connection
- Address selection pins
- Serial port for "Serial-over-CAN" function
Protections:
Over-current Under-voltage Short-circuit - Over-temperature
- Over-voltage (surge protection)
CAD files
Version 1.0.x
Version 1.1.x
Version 1.2.x
Manuals
Firmware
Compatible with all hardware versions.
CAN Driver firmware v.1.46 (122Kb 25.12.2025)
- Overcurrent protection sensitivity is reduced to avoid false triggering on ultra-short spikes
- Added a new parameter, "Encoder signal lost timeout before failure", to ignore short encoder signal faults (missed data). Default value: 100 ms.
CAN Driver firmware v.1.42 (108Kb 10.09.2025)
- Bugfix: gearing ratio motor-to-encoder different from 1.0 worked incorrectly
CAN Driver firmware v.1.41 (108Kb 11.06.2025)
- 2nd driver on axis support - with only one encoder
- increase sinus table in 4 times and use 24 bit encoder data internally to make more precise output
- LPF for CAN Drv input torque data to decrease motor noise
- IC-MU internal calibration
- 22 bit encoder data output to SBGC
- Bugfixes:
- Fix problem with motor noise when encoder data drops
- CAN Rx FIFO interrupt fix - data exchange will be faster
- 1-wire problem fix: self-adapting uart baudrate to match sensor clock in the whole temperature range
CAN Driver firmware v.1.30 (105Kb 23.10.2024)
- Added "Serial-over-CAN" functionality (main firmware 2.72b0+)
- Telemetry from the driver can be requested via Serial API (main firmware 2.72b0+)
- Added a support of hardware version CAN_DRV 1.2.x
- Bugfixes:
- SPI encoders didn't work in v.1.29
- TLE5012 wrong initialization
- Other minor bugfixes
CAN Driver firmware v.1.26 (100Kb 27.12.2022)
- Improved efficiency in a high-speed rotation mode
- Bugfix: not all combinations of motor/encoder rotation direction worked properly
CAN Driver firmware v.1.16 (105Kb 7.06.2021)
- Netzer VLX60 encoder support (Biss-C)
CAN Driver firmware v.1.15 (105Kb 10.01.2021)
- Aksim2 encoder support (SPI & Biss-C)
- Change method of PWM encoder capture (RLS Orbis PWM fixed errors in reading near zero point)
- AMT223/AMT222 encoder support
- CAN protocol update - more stable, ready to work in parallel with GPS_IMU
CAN Driver firmware v.1.11 (113Kb 21.05.2020)
- Improved calibration of R,L motor parameters
- Added extra safety checks and safety limit parameters
- Minor bugfixes and other improvements
CAN Driver firmware v.1.07 (105Kb 24.10.2019)
- Add a support of new encoders: Zettlex IncOder (SPI-over-RS422), iC-Haus iC-MU (SPI), TLE5012B (SPI, PWM), A1335 (SPI, I2C), AM4096 (I2C), AS5048B (PWM), MA730 (SPI, PWM)
How to upgrade firmware
To upgrade the firmware in the CAN_DRV module(s), connect modules by CAN interface to the main controller connected to a PC running SimpleBGC32 GUI.
Note: it's required to connect main power supply to make CAN_DRV working (they are not powered from USB).
In SimpleBGC32 GUI:
- Turn motors OFF by the button "MOTORS ON/OFF"
- Go to "Upgrade" tab, open "Connected modules" tab. Press the "Refresh" button to load information about modules.
- Select a required module from the list. GUI will show current hardware, firmware and bootloader versions for each module
- Browse for the file containing new firmware. Be careful, flashing improper file will make the device "bricked" and it will be hard to make it alive.
- Press "Flash" button to write firmware.
- Reconnect USB to restart gimbal controller and let him see changes.
- Connect GUI and repeat steps 2, 3 to check that new firmware is working and system operates normally.
Support
Type your question or comment below. Answer will be sent at your E-mail within 24 hours on workdays.