CAN IMU Rev.C
CAN_IMU Rev. C is compatible with the SimpleBGC 32-bit Extended, Pro, and CAN_MCU controllers. This is an improved version of CAN_IMU and can be used as a direct replacement.
Features
- CAN bus* provides a more reliable and error-free connection compared to the I2C, not limited in length. CAN bus is supported by the "extended" family of SBGC32 controller.
- I2C port is compatible with the regular SBGC32 IMU cable and all SBGC32 controllers.
- EEPROM to store calibration data.
- Nex-gen 6-axis sensor ICM-42688-P from InveSense has a better performance compared to the previous generations.
- Additional I2C, SPI, and UART interfaces for the external device connectivity (see the list of supported devices below).
- PWM output for controlling an external thermal stabilization device (PCB, 3D model and assembling instructions are available in "Downloads")
- Compact size. Mounting holes are compatible with the I2C IMU and prev. version of the CAN_IMU. Optional box.
- Factory-calibrated (accelerometer offset and scale, gyroscope offset)**
* For proper functionality of CAN IMU, you need the firmware version 2.61b2 or above.
** Factory calibrations should be transferred to the main controller using the "Calibration helper" tool in the GUI
Specifications
| Size of the board | 25×25 mm | |
| Weight | 2.68 g | |
| Distance between the mounting holes | 14.2 mm | |
| Diameter of the mounting holes | 3 mm | |
| Electrical characteristics | ||
| Power supply voltage range | 4.5 - 5.5V | |
| Current consumption | 50 mA max (without external load) |
|
| 3.3V output current capabilities | 100 mA max. | |
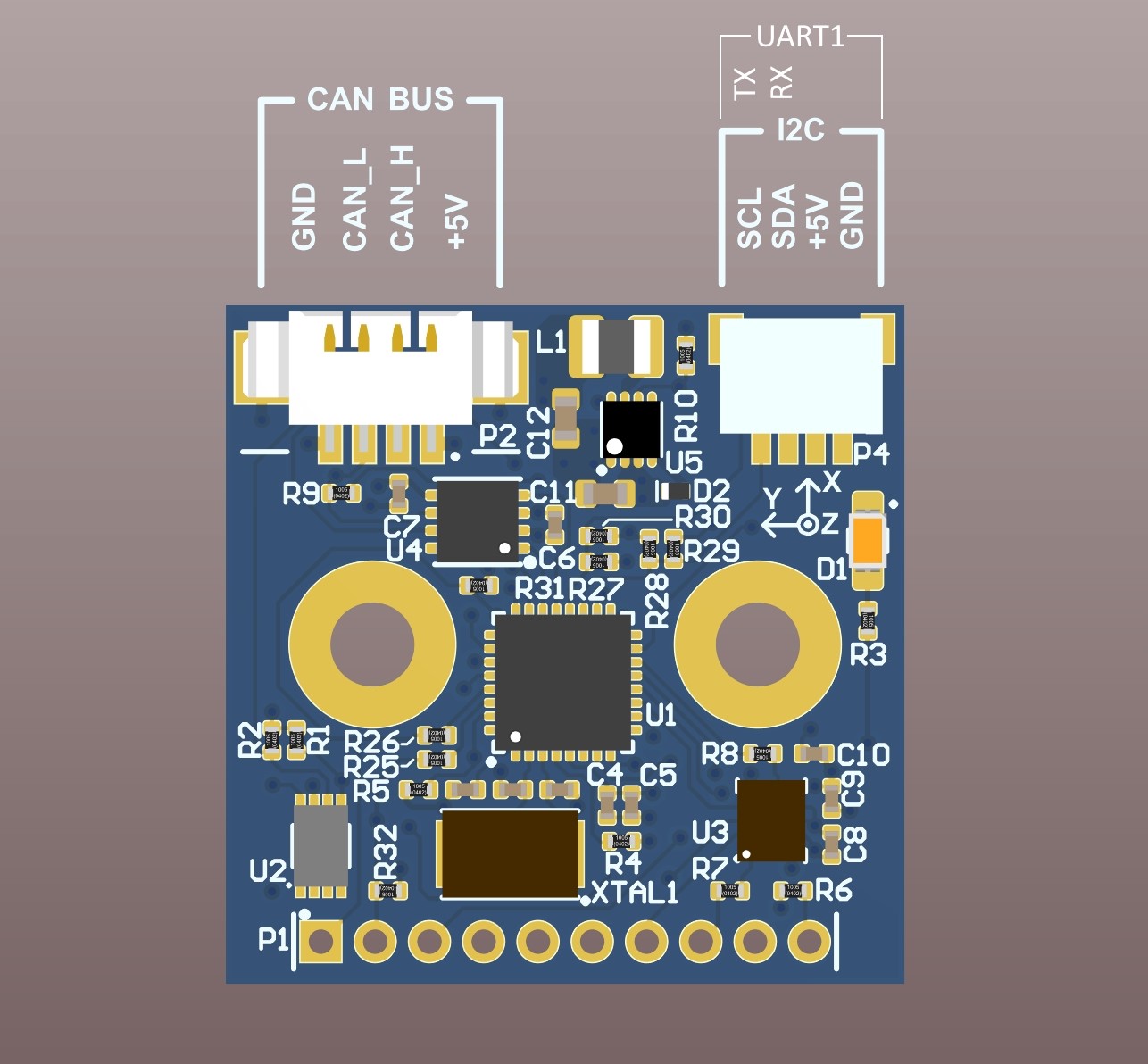
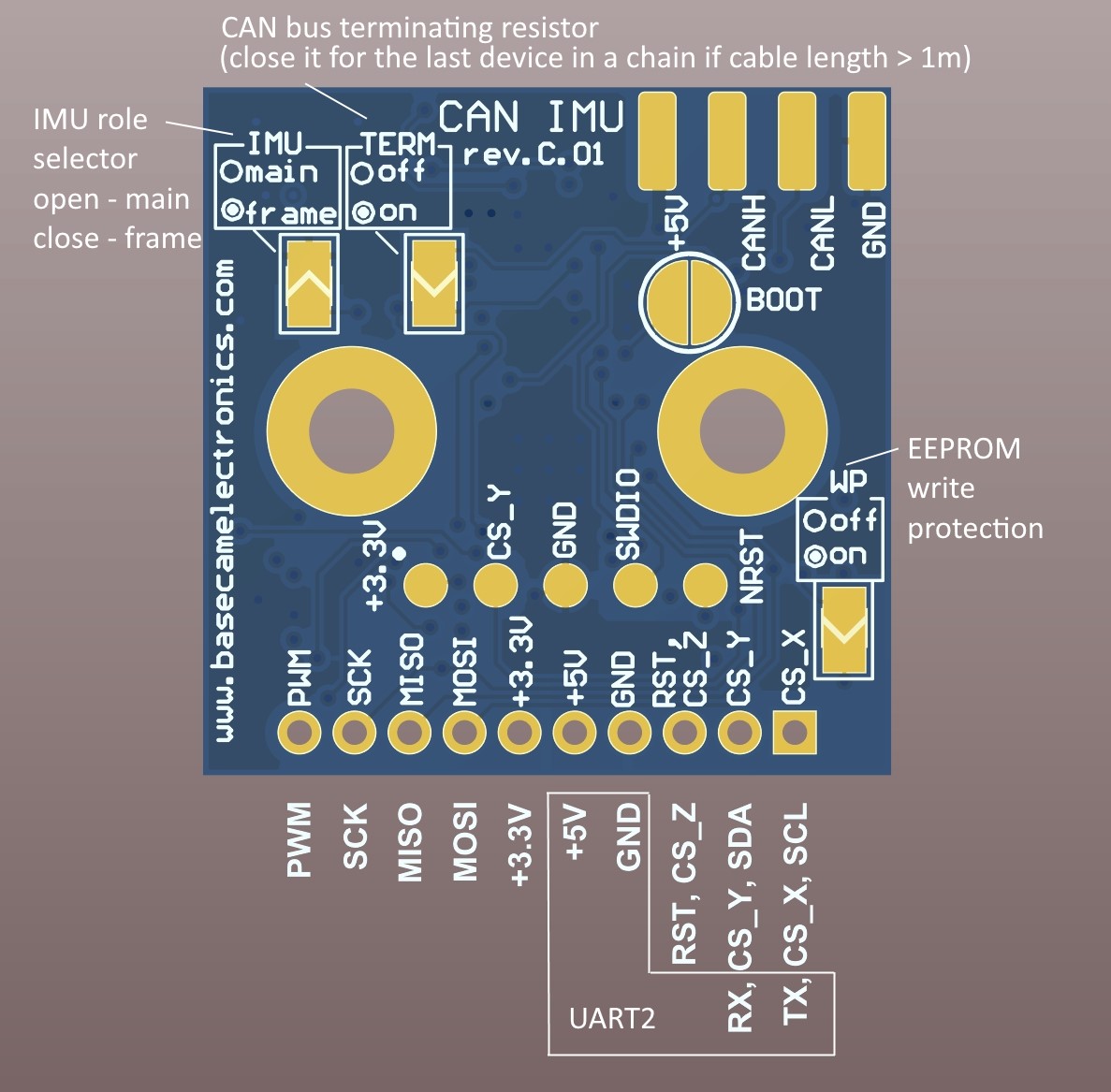
Interfaces
2.0" header connector pins description with alternative functions
- PWM - PWM waveform output for thermostabilisation, for future use
- SCK, MISO, MOSI - external sensor connected by SPI
- CS_X, CS_Y, CS_Z - "device select" pins for SPI connection. CS_X for 3-axis devices, other for connecting 1-axis gyroscopes individually.
- RX, TX - external sensor connected by UART
- SDA, SCL - external optional magnetometer connected by I2C
- RST - connected to NRST pin of the external sensor (required for some models)
List of the supported external sensors
CAN_IMU supports a high-grade external sensor. It may be a high-quality gyroscope - in this case, the external gyroscope replaces the internal one. If the device has a 3-axis accelerometer, it replaces the internal accelerometer. For complete AHRS devices, the provided attitude and heading information are used instead of the attitude/heading estimated by our internal algorithms.
- Vectornav VN100, VN200 - AHRS + GNSS (VN200 only). Connected by UART or SPI
- KVH 1725, 1750, 1775 - 3-axis fiber optic gyroscope + 3-axis accelerometer. Connected by UART
- KVH 1760 - 3-axis fiber optic gyroscope. Connected by UART
- ADXRS453 -1-axis gyroscope, connected by SPI
- ADIS16460 - 3-axis gyroscope + 3-axis accelerometer, connected by SPI
- STIM210 - 3-axis gyroscope, connected by UART
- STIM300 - 3-axis gyroscope + 3-axis accelerometer, connected by UART
- Murata SCHA63X - 3-axis gyroscope + 3-axis accelerometer for industrial applications
- Kebni SensAltion AHRS/INS - AHRS or AHRS + INS, connected by SPI
Installation Recommendation
The CAN IMU is designed for integration into enclosed end equipment or systems. As part of standard installation practice, the device should be installed within a suitable housing or protective enclosure that limits direct access to metallized surfaces. For enhanced robustness in environments where electrostatic discharge may occur, integration into an appropriate enclosure or shielding structure is recommended, ensuring stable and reliable operation in harsh environments.
Downloads
External sensors
ADIS16460 connection (206Kb 20.07.2021) Vectornav VN100/VN200 connection (278Kb 20.07.2021) ADXRS453 connection (501Kb 20.07.2021) KVH17xx series connection (318Kb 6.02.2020) STIM210 (STIM300) connection (497Kb 14.09.2021) Murata SCHA63X connection (427Kb 18.05.2023) Murata SCHA63X PCB and housing (2Mb 16.05.2023) Kebni SensAltion AHRS/INS connection (314Kb 29.09.2025) Special Firmware for CAN_IMU with Kebni sensor support, ver.1.53 (55Kb 29.09.2025)Thermal stabilization
Thermostat assembling instructions (7Mb 19.04.2023) Thermostat PCB sources (2Mb 17.05.2023) Thermostat housing 3D models (30Mb 17.05.2023)Firmware
CAN IMU Firmware v.1.46 (54Kb 31.01.2024)
- Bugfixes and improved stability
CAN IMU Firmware v.1.45 (54Kb 16.01.2024)
- Thermo-stabilized CAN_IMU support (its configuration is available in 2.72b0 main firmware)
- Better processing of high-resolution gyroscope data in external sensors to improve angle stability
CAN IMU Firmware v.1.38 (50Kb 31.05.2023)
- Bugfix in handling of an external sensor Murata SCHA63X
- Add support of an external sensor Epson G354/G364/V340/G365/G370
CAN IMU Firmware v.1.37 (46Kb 28.02.2023)
- bugfix in handling of an external sensor (ADIS16460, STIM210, etc.)
CAN IMU Firmware v.1.35 (47Kb 4.04.2022)
- Add support of an external sensor Murata SCHA63X - high-quality 6-DOF gyroscope and accelerometer (starting from SBGC32 firmware v.2.71b6)
- Add support of "Serial link over CAN" (starting from SBGC32 firmware v.2.71b6)
CAN IMU Firmware v.1.32 (38Kb 20.07.2021)
- Support external sensors ADIS16460, Vectornav VN100, VN200 (UART)*, STIM210 (UART), STIM300 (not tested)
- Bugfix: was not working as 2nd frame IMU
* Vectornav ext. sensor support is implemented starting from 2.71b0 main firmware
How to upgrade firmware
To upgrade a firmware in the CAN module, connect module by CAN interface to the board, connect the board to a PC and run SimpleBGC32 GUI. It's better to not connect a battery.
- Go to "Upgrade" tab, open "Connected modules" tab. Press the "Refresh" button to load information about modules.
- Select a required module from the list. GUI will show current hardware, firmware and bootloader versions for each module (excepting GUI prior to 2.62: it shows hardware and bootloader version only).
- Browse for the file containing new firmware. Be careful, flashing improper file will make the device "bricked" and it will be hard to make it alive.
- Press "Flash" button to write firmware.
- Reconnect USB to restart gimbal controller and let him see changes.
- Connect GUI and repeat steps 2, 3 to check that new firmware is working and whole system operates normally.
1 If sensor is connected by the I2C interface, for 100% compatibility it is required to upgrade firmware in the main controller to version 2.61b9 and above.
Support
Type your question or comment below. Answer will be sent at your E-mail within 24 hours on workdays.
![[$title]](/media/can-imu.jpg)
![[$title]](/media/can-imu_front.jpg)
![[$title]](/media/can-imu_back.jpg)